
从“看得到”到“插得进”:Contactile GAL2触觉型夹爪如何补上视觉装配的最后一环
当机器人“看得见”也“摸得着”:触觉如何补全精密装配的最后一环
在电子、医疗等精密制造领域,微米级公差累积、软质部件弹性形变、多零件公差叠加等问题,常导致“视觉能定位但抓不准/插不进”的尴尬——即便机械臂路径规划精准,视觉也难以捕捉物理接触后的动态偏差。
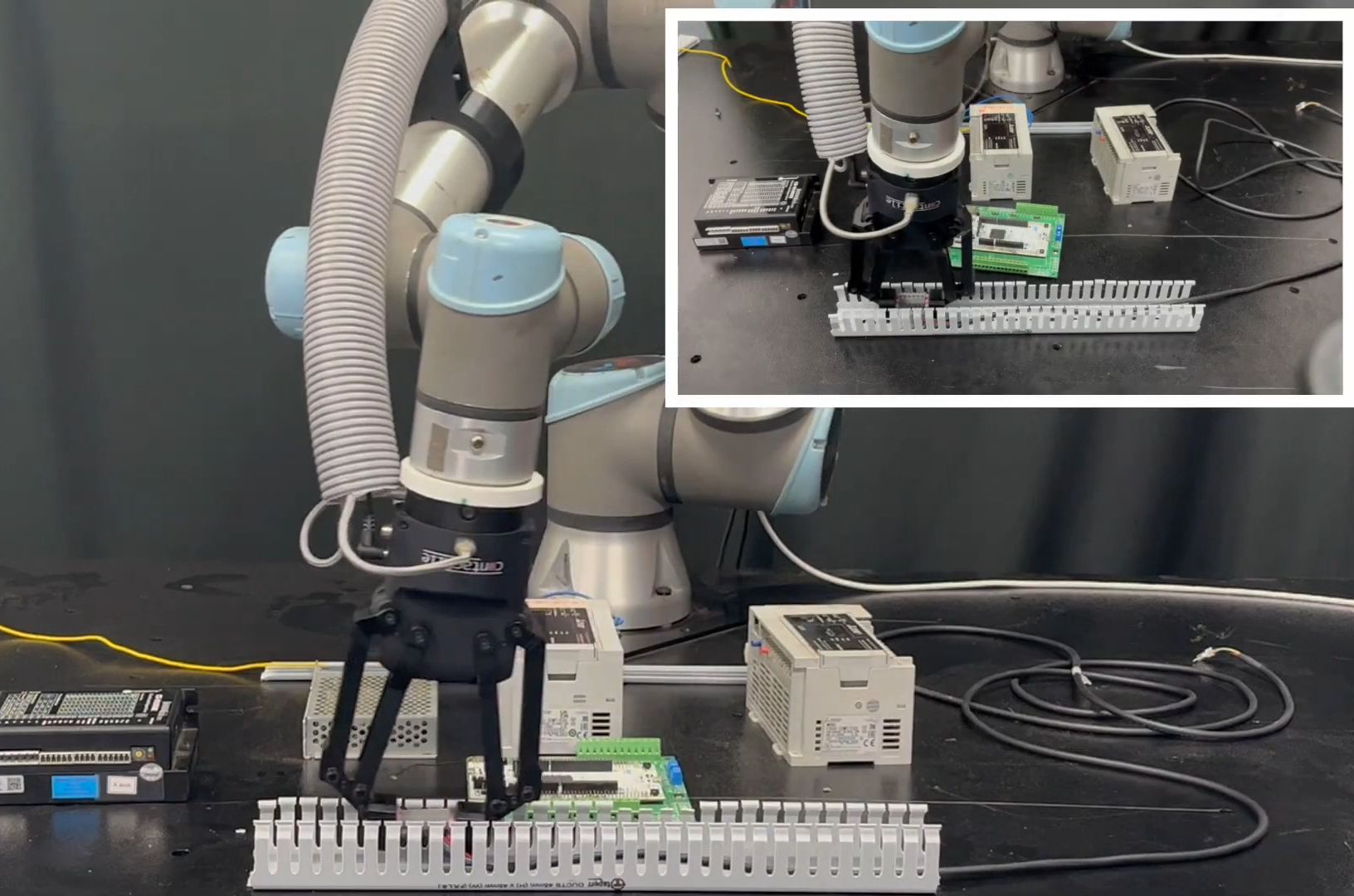
Mowito团队的最新演示,正是瞄准这一行业顽疾:一套融合UR协作机器人、工业相机与Contactile GAL2触觉型夹爪的智能装配系统,在电缆装配任务中实现了高成功率操作。这一成果并非依赖单一传感器,而是通过视觉预定位 + 触觉闭环调节的协同策略,解决了传统自动化中因微米级偏移、弹性形变和公差累积导致的装配失败难题。
「视觉引导 + 触觉闭环」:破解“精准抓插”的双重难题
实际作业中,系统遵循“视觉预定位→触觉微调整”的协同逻辑:
•视觉系统先完成插头与端口的“粗略定位”,规划机械臂的初始接近路径(解决“目标在哪”的空间适配问题);
•但物理接触后,视觉因“被遮挡/动态干扰”失效,真正的挑战才刚开始——此时,Contactile GAL2触觉型夹爪(UR机械臂的“柔性执
行末端”)接过“精准控制”的接力棒:

GAL2指尖集成的Contactile三轴触觉阵列式传感器(即在夹爪指尖布置数百个微小传感单元,同步采集X/Y/Z方向的力、压力分布与微振动),让夹爪拥有了“类人触觉”:
当插头轻微偏离中心,触觉阵列会检测到“一侧受力显著大于另一侧”;系统随即生成反向调整力矩,驱动UR机械臂微调姿态,实现“边触边纠”的自适应插入——这类似于人类手指“盲插USB时,试探→感知卡顿→调整角度”的过程,是纯视觉系统无法复制的柔性控制。
触觉不只是“感觉”,更是“决策大脑”
Contactile触觉传感器的优势在于其空间分辨率与动态响应能力。相比传统单点力传感器,它能构建接触面的“力场图谱”,从而判断:
- 插头是否已完全进入端口(通过力分布趋于均匀)
- 是否存在卡顿或摩擦异常(如材料变形产生的峰值力)
- 是否即将发生滑脱(通过检测预滑移信号)
这些信息被实时反馈至控制系统,用于触发握力调节、暂停动作或启动重试逻辑,很大程度上提升了任务鲁棒性。
从“视觉主导”到“触觉闭环”:自动化的新范式
该案例揭示了一个重要趋势:在复杂装配场景中,视觉负责“看见目标”,触觉负责“确认到位”。两者并非替代关系,而是互补协同。尤其在以下场景中,触觉成为关键瓶颈突破者:
|
应用场景 |
视觉局限 |
触觉价值 |
|
电子装配(FPC/内存条) |
难以判断插入深度与阻力 |
感知插入力曲线,避免金手指压损 |
|
医疗设备组装 |
软质部件易变形,视觉失真 |
实时监测接触力,防止挤压变形 |
|
食品包装 |
材料软硬不一,易滑脱 |
动态调节夹持力,提升稳定性 |
|
科研实验 |
需要精确力控与数据采集 |
提供高维触觉数据支持机器学习 |
迈向具身智能:让机器人做到“手眼协同”
Mowito的案例揭示的不仅是技术整合,更是一种范式转移:自动化正从“预设路径的精确执行”,转向“基于感知的动态适应”。在这一转变中,UR机械臂 + 视觉 + Contactile GAL2触觉型夹爪构成了具身智能的最小可行单元——机械臂是身体,视觉是眼睛,而GAL2,是它的“指尖”。
真正的操作智能,往往始于接触的瞬间。当机器人不仅能识别目标位置,还能感知材料的形变、摩擦的动态与力的分布,它便更接近对物理交互过程的深入理解。Contactile触觉型夹爪GAL2的价值,正是将这一理解能力赋予末端执行器,使自动化不再依赖理想环境,而能在真实世界的不确定性中稳健运行。
这不仅是效率的提升,更是智能操作的起点。

