
剑桥斯坦福HOMER研究突破:Kinova机械臂通过混合动作模式实现"导航-操作"一体化
斯坦福与剑桥大学联合研发的HOMER系统实现了家庭服务机器人技术突破,通过混合模仿学习和全身控制技术,搭配Kinova Gen3机械臂(7自由度/5.2kg/±0.5mm精度),在真实家庭场景中达到79.17%的任务成功率。该系统仅需20次演示即可学习新任务,15分钟完成动作标注,支持语言指令理解,可应用于家务、医疗护理等领域。研究验证了"少量数据+混合控制"模式的可行性,推动了服务机器人实用化进程。
01 研究背景:破解移动操作"手脚不协调"难题
传统机械臂多固定在桌面,缺乏机动性;移动机器人又常因"手脚"协调复杂而动作生硬。这正是家庭服务机器人迟迟难以落地的核心瓶颈。
HOMER框架的创新之处在于:用全身控制器(WBC)把"手要到哪里"直接翻译成"底盘怎么滑、关节怎么转",让机器人像人类一样先想后动。
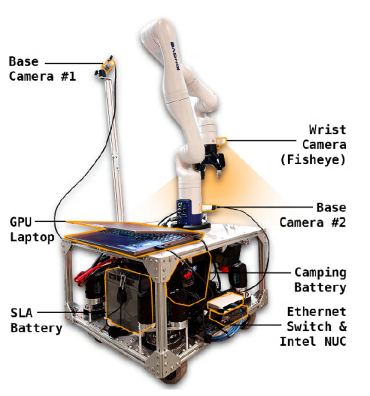
而轻量7自由度的Kinova Gen3成为研究首选,仅5.2kg的臂体可无缝集成到移动底座,为解决这一难题提供了硬件基础。
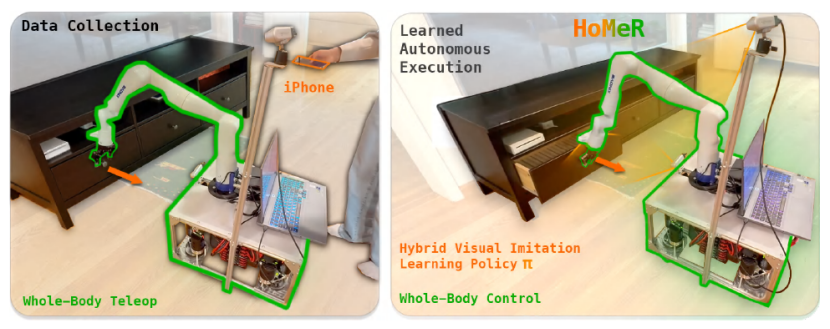
图1: HOMER框架示意图,展示遥操作数据收集和混合策略学习过程
02 方法亮点:混合策略+高效学习,精准执行复杂任务
HOMER框架的核心优势在于"混合动作模式":机器人可自动切换关键姿势(适配长距离移动)与密集动作(适配精细操作),将复杂协调任务交给全身控制器处理。
技术突破体现在三个方面:
1、高效学习机制:仅需20次演示即可掌握新任务
2、精准执行能力:Kinova Gen3凭借±0.5mm重复精度与1kHz控制环路,确保动作平滑精准
3、快速标注流程:搭配轻量化标注工具,15分钟即可完成20次演示标注
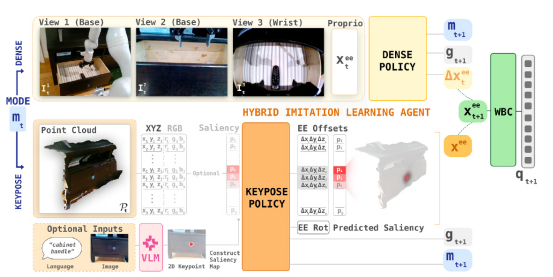
图2: HOMER策略架构图,展示密集策略和关键姿势策略的协同工作
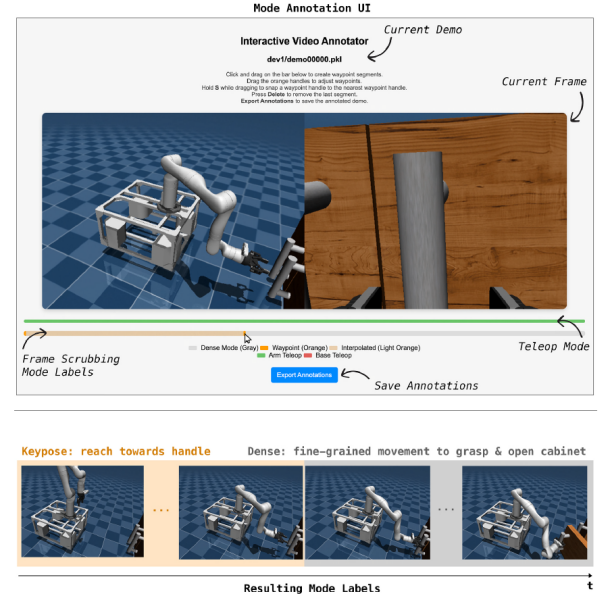
图3: 模式标注界面示例,15分钟可完成20次演示的标注
03 实验结果:真实家庭场景下的优秀表现
在模拟和真实世界的6项任务测试中,HOMER框架搭配Kinova Gen3机械臂表现优于非混合或非全身控制基线。
具体任务成果包括:
- 整理枕头任务中,机器人可精准抓取移动物体
- 远程检索任务中,能灵活处理体积大于自身的电器
- 开关橱柜、清扫垃圾等日常任务成功率达到79.17%
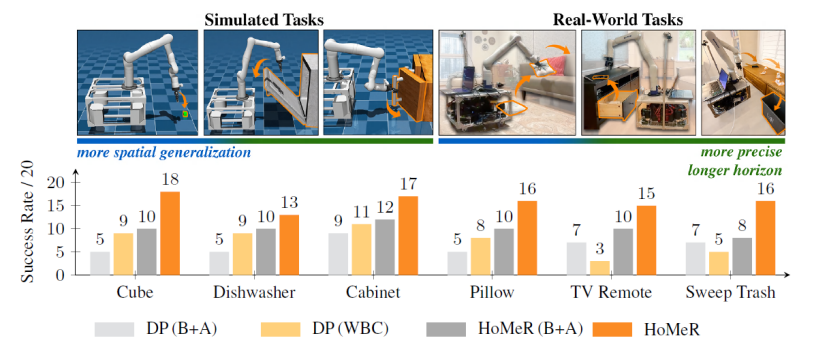
图4: 基准测试结果,HOMER在多项任务中处于领先位置

图5:实测任务一览,轻松应对各种复杂精细任务
04 泛化能力:语言提示即可定位新物体
研究还通过视觉语言模型(如MolMo模型)提取显著点,提升机器人泛化能力。这意味着机器人能够理解自然语言指令,适应未知场景。
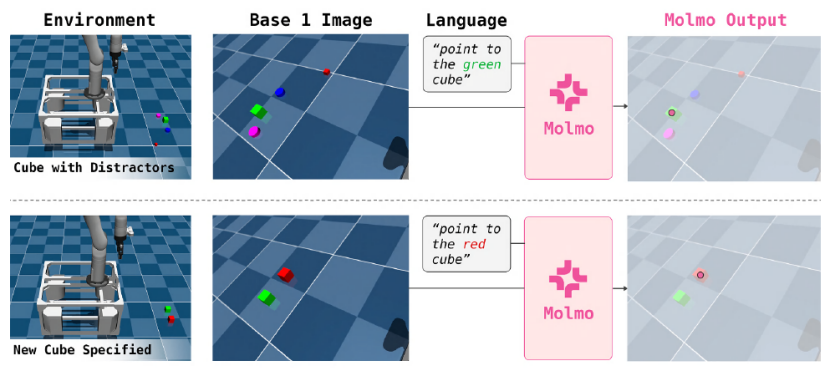
图6:从MolMo提取显著点过程,演示机器人如何适应新物体
这一能力使得Kinova Gen3机械臂不再局限于预设任务,而是能够理解人类意图,实现更智能的家庭服务。
05 核心优势:Kinova Gen3为何成为研究首选?
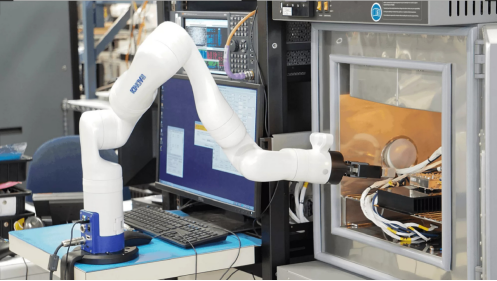
图7:Kinova Gen3 产品图
四大优势奠定应用实力:
- 轻量化设计:7自由度+5.2kg超轻量,移动平台续航友好
- 高精度控制:±0.5mm的重复精度与1kHz控制环路,适配家庭杂乱环境安全作业
- 开放生态:开放ROS2接口,即插即用,无需硬件二次开发
- 系统兼容:兼容WBC系统,一套控制参数可覆盖各类家务任务
06 应用拓展:多领域落地潜力显著
基于HOMER框架与Kinova Gen3的成熟组合,多个行业将迎来应用机遇:
- 家庭服务:扫地、整理物品、开关电器等日常任务
- 医疗辅助:手术辅助、老年护理、康复训练
- 工业自动化:仓储处理、危险环境作业
- 学术研究:为机器人学习提供标准化实验平台
目前,该方案已用于危险环境作业和老年护理场景,与HOMER框架的野外操作能力高度契合。
结语:技术实用化助力家庭机器人发展
HOMER框架验证了"少量数据+混合控制"在移动操作中的可行性,而Kinova Gen3的成熟硬件让实验室成果走向应用场景。
随着主动感知、多任务学习等方向的持续探索,服务机器人实用化进程正在加速。若您正寻找可落地、易集成、样本高效的机械臂解决方案,Kinova Gen3已准备好成为您下一个项目的“智能双手”!
【版权声明】
本文部分技术内容及数据援引自论文《HOMER: Learning In-the-Wild Mobile Manipulation via Hybrid Imitation and Whole-Body Control》,如需转载,请完整保留本声明并注明原始出处。

