
INNOCISE 壁虎抓手:Gecomer 技术赋能晶圆精准搬运
在半导体晶圆搬运等精密操作场景中,如何平衡抓取力与放置轻柔度始终是行业痛点。INNOCISE 壁虎抓手凭借核心的Gecomer 仿生粘附技术,给出了高效解决方案,引发行业关注。
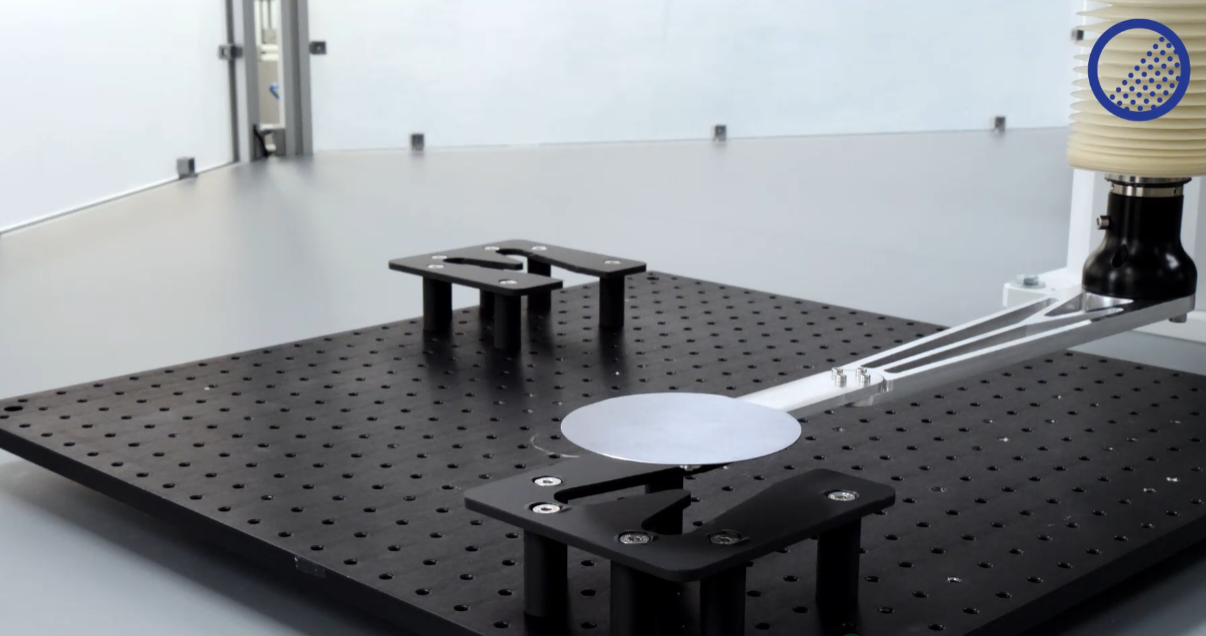

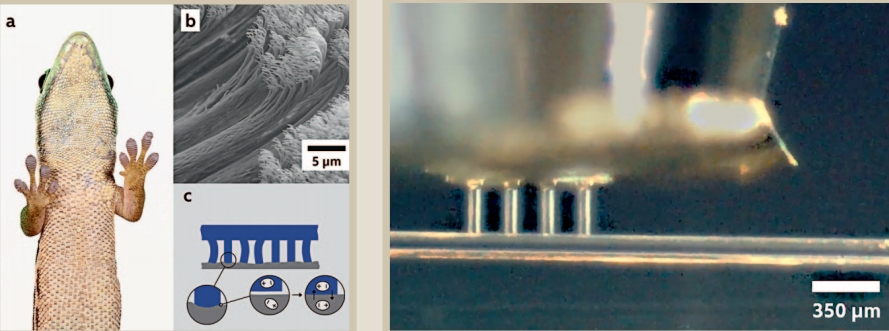
INNOCISE壁虎抓手 依托Gecomer 仿生粘附技术(模拟壁虎脚掌微纳米刚毛结构),实现了极具巧思的力配比 —— 抓手的法向粘附力与剪切粘附力达到 1:29。
这意味着什么?水平移动时,强劲的剪切强度能牢牢 “抓稳” 晶圆,避免移位;而垂直起降、释放的瞬间,仅需极小作用力就能完成操作,实现 “轻柔放手”。
这种技术特性正精准匹配行业需求:既能达成无粘合剂残留的精确定位,又因低法向粘附力与无振动设计,从源头降低晶圆损伤风险;搭配更高的移动速度,更让整体作业效率得到显著提升。
INNOCISE壁虎抓手 Wafer Gripper专为晶圆搬运优化设计,提升剪切粘附力,实现高速搬运,可广泛应用于半导体晶圆等精密器件搬运。
如今更凭借这一技术优势,INNOCISE在电子、光学、光刻机、航空航天、汽车工业、电信行业、生命科学、包装等众多精密制造领域逐步应用,以 “强固抓取” 与 “轻柔放置” 的特性,助力各领域应对物料搬运难题。
创建时间:2025-11-03 19:35

