
破解机器人“数据荒”!英伟达开源Isaac Teleop,Manus数据手套成官方生态核心
在刚刚结束的GTC 2026上,NVIDIA宣布开源Isaac Teleop——一个统一的高保真自我中心与机器人数据采集框架。这一消息在机器人研究圈内引发震动,因为这可能是解决机器人学习“数据荒”问题的关键突破。
而更引人注目的是,Manus数据手套作为官方支持的输入设备,正式成为这一生态系统的核心组成部分。

机器人学习的“数据荒”
“得数据者得天下”,这句话在具身智能领域尤为贴切。当前机器人产业面临的核心瓶颈并非算法或算力,而是高质量、大规模、低成本的数据。
传统数据采集方式各有局限——遥操作设备昂贵且效率低下,仿真数据存在Sim2Real差距,动作捕捉系统部署复杂且易受干扰。
更关键的是,灵巧操作数据的采集尤为困难。人手拥有27个自由度,能够执行捏、握、转、拨等精细动作,而要将这些复杂动作转化为机器人可学习的数字信号,传统方法往往力不从心。
Isaac Teleop:构建标准化的数据管道
Isaac Teleop 的核心突破,在于建立了一套从采集、处理到应用的标准化数据管道,这直接应对了机器人学习中的数据碎片化与高成本难题。
- 统一的采集接口:它提供了标准化的设备接口,无缝支持从XR头显、Manus手套、身体追踪器到脚踏板等多种高保真输入设备。
- 灵活的数据转换(Retargeting):通过其灵活的、基于图的重定向(Graph-based Retargeting)管道,采集到的人类动作数据可以被高效、准确地映射到不同形态的机器人关节空间上。
- 简化的端到端工作流:该框架将设备集成、数据录制、仿真回放等流程标准化,为研究人员提供了一个“开箱即用”的解决方案。

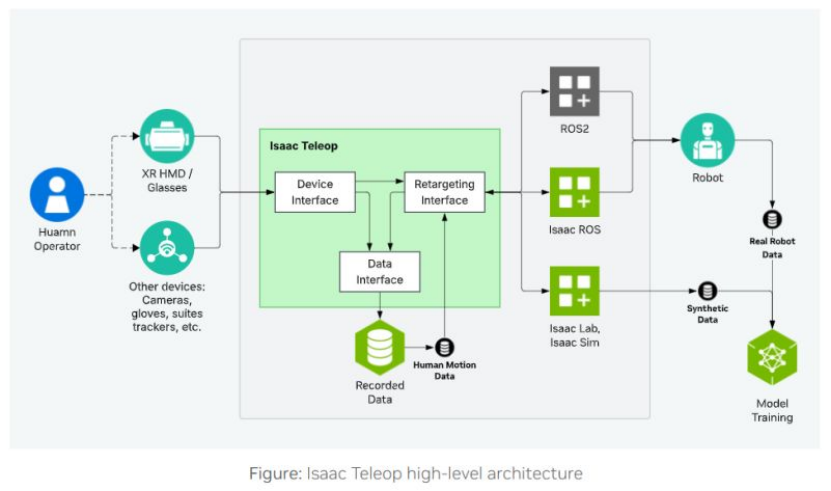
这一开源框架的发布,标志着机器人数据采集从“各自为战”走向“标准化协作”。研究人员不再需要为每种设备开发独立的接口和数据处理流程,并可以优先在仿真环境中,低成本快速生成大规模、高质量的机器人训练数据集,从根本上解决机器人学习中的“数据瓶颈”问题,并留出更多时间聚焦于算法创新本身。
核心硬件:Manus数据手套,毫米级精度破解数据质量瓶颈
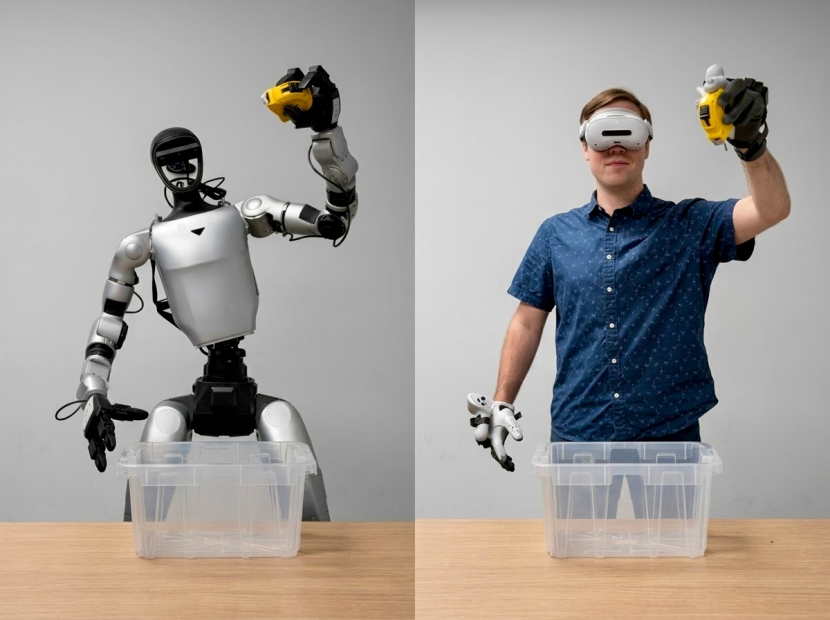
在Isaac Teleop的官方文档中,Manus数据手套被明确列为原生支持的遥操作设备。这不是偶然——Manus正是为解决灵巧操作数据采集的痛点而生。
Manus高精度动捕手套采用电磁场(EMF)传感器技术,提供无漂移、抗遮挡、毫米级关节追踪精度,全手25个自由度,完整捕捉灵巧操作所需的手部运动学数据。
在英伟达的EgoScale项目中,研究人员使用Manus数据手套捕捉的高保真手指数据,结合Vive追踪器记录手腕运动,创建了人机对齐的关键数据层。这一对齐层成为将大规模人类视频知识转移到机器人控制中的桥梁。
未来展望:数据驱动的具身智能新时代
随着Isaac Teleop的开源,机器人数据采集正在进入一个新时代:
降低技术门槛:标准化接口让研究人员更容易上手
加速算法迭代:高质量数据缩短了开发周期
减少试错成本:仿真优先策略避免了真实世界的昂贵错误
对于产业界而言,这意味着机器人落地的速度有望显著提升。在医疗机器人领域,手术机器人通过采集专家操作数据,结合触觉反馈系统,实现微创手术的远程执行;在工业场景中,机器人通过学习人类操作员的精细动作,能够完成复杂的装配任务。
而Manus数据手套(Quantum、MetaGloves Pro等)作为Isaac Teleop生态系统的关键组件,正在从“工具”完成向“平台”的转变——它不仅提供数据采集能力,更成为了连接人类智能与机器智能的桥梁。
参考资料
· NVIDIA Isaac Teleop 开源项目(GitHub):https://github.com/NVIDIA/IsaacTeleop
· Isaac Teleop 官方文档: https://nvidia.github.io/IsaacTeleop/main/index.html

