
Hello Robot发布Stretch3机器人高保真模拟平台-Stretch MuJoCo v0.5-涵盖数百种Robocasa厨房应用测试场景
在机器人研究与具身智能探索中,仿真技术是推动实验验证和算法迭代的重要工具。Hello Robot团队近期发布了Stretch MuJoCo v0.5,这是一个基于MuJoCo物理引擎构建的高保真仿真平台,专为Stretch 3机器人设计,支持多种操作系统与ROS2生态。

仿真平台的核心亮点:
✅ 跨平台运行
Stretch MuJoCo v0.5支持Ubuntu、MacOS和Windows操作系统,这使得不同操作系统的用户都能无障碍地使用该平台进行开发和研究。
✅ 实时仿真能力
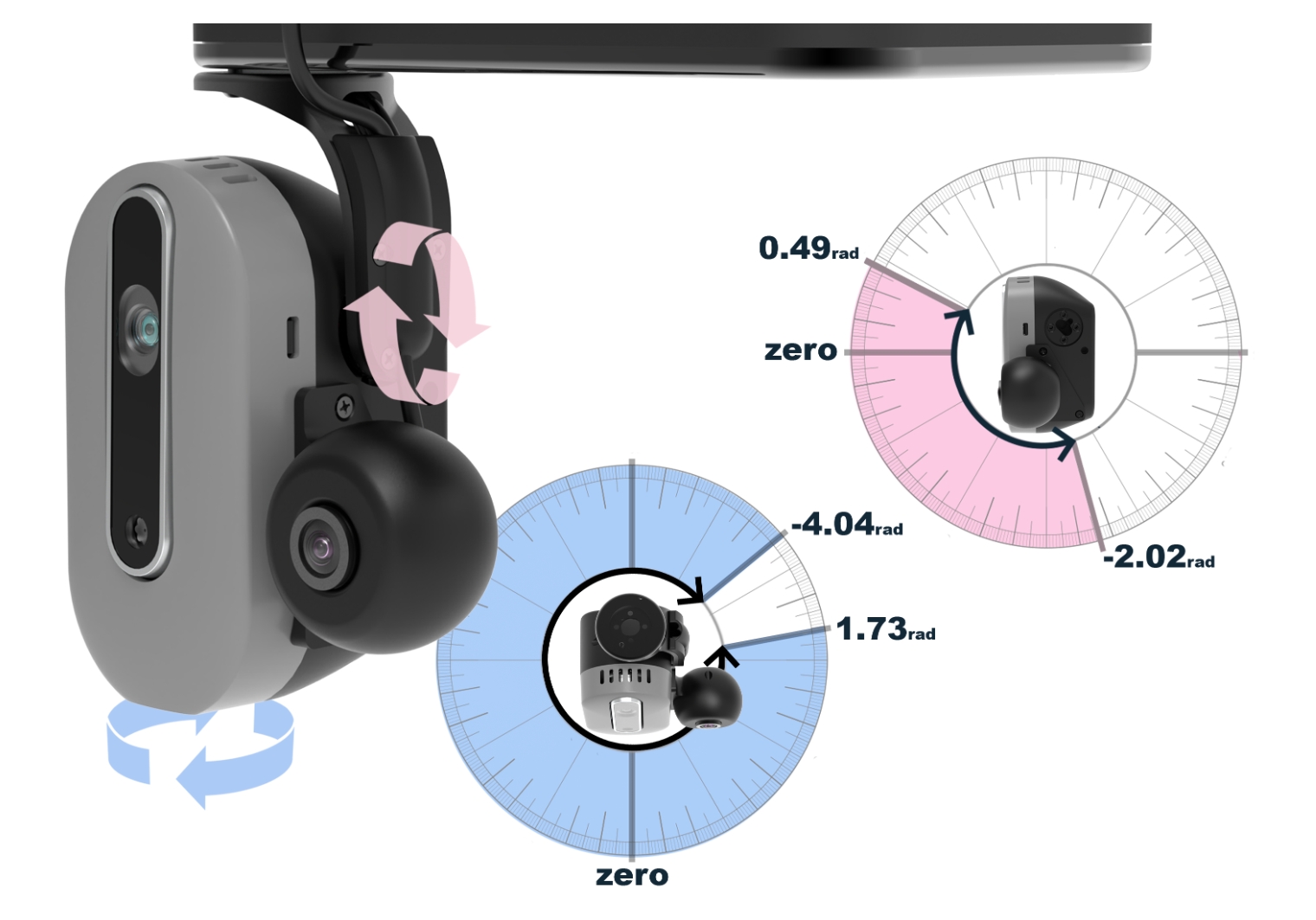
该平台能够实时模拟Stretch 3机器人的运动和交互,这对于需要精确控制和快速反馈的实验来说至关重要。

Stretch Mujoco库:基于 MuJoCo 构建模拟堆栈,支持关节控制、多传感器数据获取,有可视化与 Headless 模式,集成 ROS2,可生成百种厨房环境并具备高级模拟功能。
✅ 丰富Python库
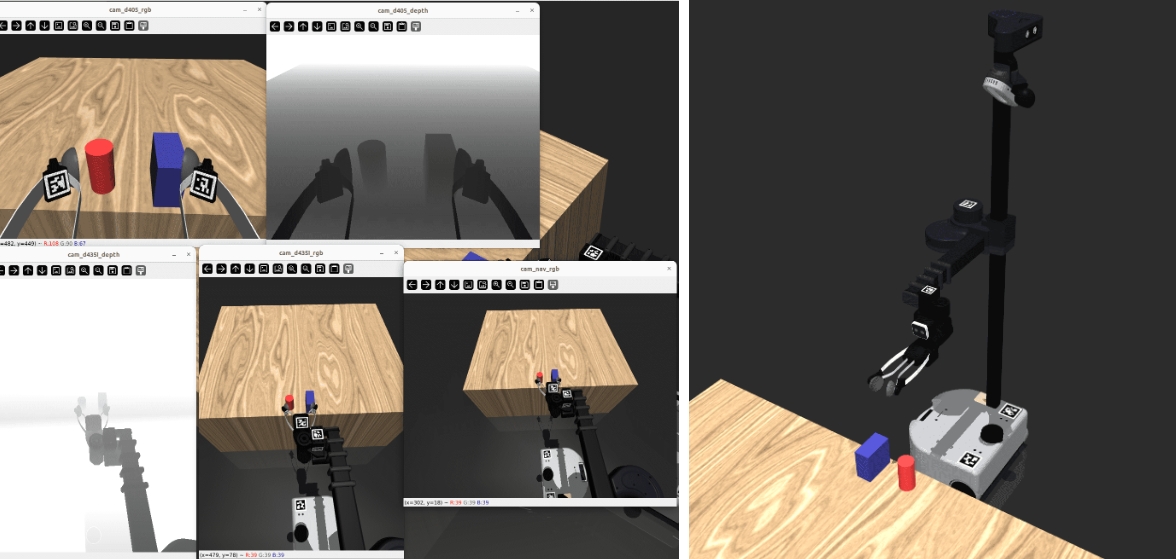
提供了一个功能强大的Python库,包含运动API、彩色和深度图像数据以及2D激光雷达扫描等功能。这些功能让开发者能够轻松地获取和处理机器人在仿真环境中的各种信息。
✅ 多样化测试环境
平台可以生成数百种Robocasa厨房风格环境的排列组合,为机器人提供了丰富的测试场景。

✅ 高效无头模式
支持在Google Colab T4或CPU实例上以无头模式运行,这大大提高了在云端进行大规模仿真的效率。
✅ ROS2深度集成
与ROS2深度集成,支持Nav2、点云数据以及Stretch Web Teleop等功能,这使得该平台能够无缝融入现有的ROS2生态系统。
✅ 可扩展高级API功能
平台还提供了高级API,支持可变形物体、程序化模型生成、SDF碰撞检测、布料仿真等功能。
开发者友好支持
Hello Robot团队提供了详细的使用文档与教程,帮助用户快速搭建仿真环境并开展研究工作。
Stretch MuJoCo v0.5 让开发者更轻松编写新代码、测试并部署到机器人上,推动具身智能研究和开发。

