
INNOCISE 壁虎吸盘:开启机器人无源、无痕、高效抓取新时代—面向半导体晶圆、光学透镜、航天电子等精密部件的专属方案
抓取对人类而言是再自然不过的动作,但对于机器和机器人来说,实现稳定、高效的抓取却往往依赖复杂且能耗较高的解决方案。传统吸附技术也存在诸多局限,例如使用粘合剂带来的残留问题,或在不同环境下的适应性不足等。
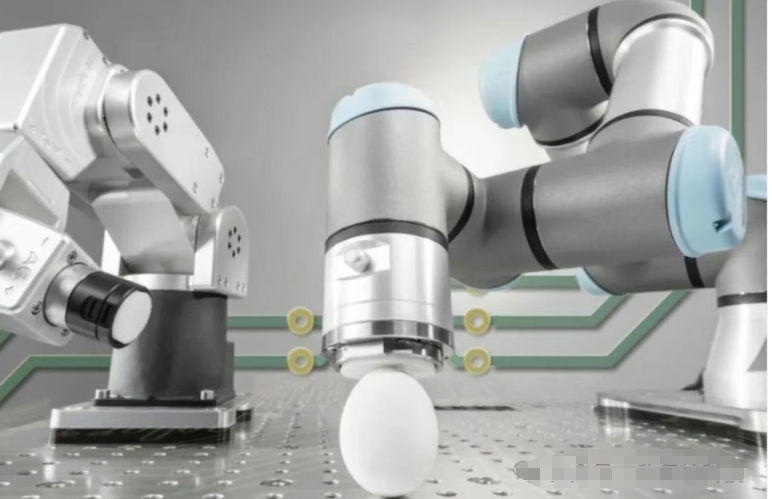
INNOCISE基于壁虎吸附原理开发出Gecomer技术,为机器人抓取难题提供了创新思路。该技术无需粘合剂即可在多种表面实现稳定吸附,并可根据需要轻松释放,具备良好的灵活性与可持续性。
INNOCISE技术原理:Gecomer仿生粘附技术
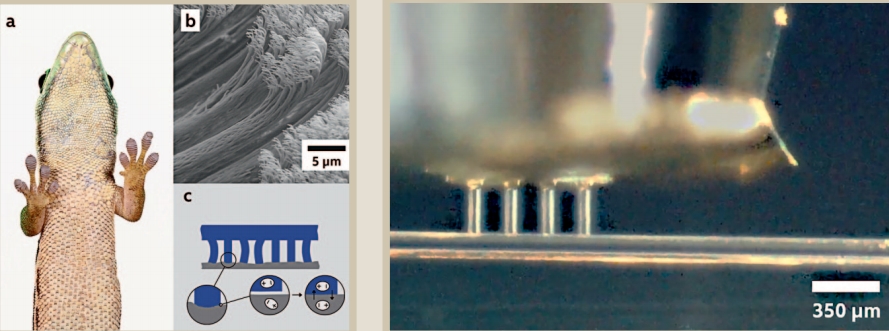
壁虎依靠脚掌中的纳米刚毛与表面产生的范德华力实现吸附。INNOCISE 模拟这一结构,在2.5mm厚的垫片上集成数万根直径仅为50μm的仿生吸附结构,通过分子作用力实现无损抓取与释放。

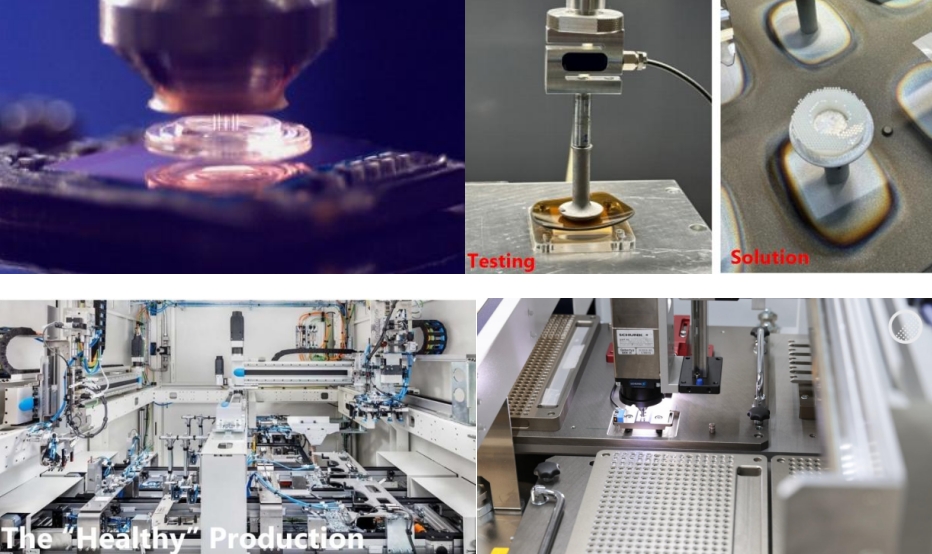
抓取: 利用范德华力进行吸附

释放: 通过横向移动或旋转分离分子间的相互作用

INNOCISE壁虎吸盘技术优势
无需外部能源:采用仿生结构与特殊材料,无需电力或真空即可吸附,节能便捷。
广泛表面适应性:适用于玻璃、金属、塑料等光滑或曲面、部分多孔材质,吸附稳定。
高度适应性:适配不同形状、尺寸与重量物体,涵盖微小零件至较大工件的多种场景。
维护简便:配套清洁站、自动化清洁垫等工具,快速清除灰尘,保障性能与寿命。
INNOCISE产品系列
手动解决方案

手动抓取工具:三档尺寸设计,特别适合手表机芯装配和实验室微样本操作。
混合夹具:支持手动和自动化双模式,可根据需求定制。
清洁站:配备重底座和胶带清洁功能,用于光学元件产线维护。
自动解决方案

Arigrip:专为微小部件设计,适用于自动化生产线上的精密搬运
Beagrip:兼容手动与自动操作,适用于中等尺寸和重量物体
Phelgrip:具备可调节几何结构,适应更大范围的物体尺寸
Wafer Gripper:针对晶圆搬运优化设计,提升剪切粘附力,实现高速搬运
此外,还可根据高温、洁净室、紫外线等特殊工艺环境提供定制化服务。
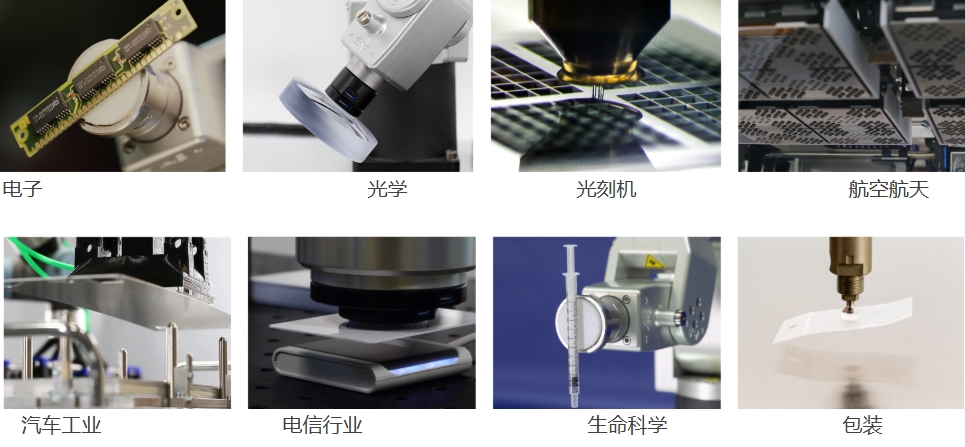
INNOCISE壁虎吸盘已在多个行业落地应用
电子:SMD元件自动装配。
光学:透镜精密搬运与装配。
光子学:晶圆处理、光子电路集成。
航空航天:航天部件自动化搬运。
汽车:双极板搬运。 通信:光纤对准。

