
AllegroHand四指灵巧手
Wonik Robotics 作为机器人灵巧手技术领域的佼佼者之一,专注于创新机器人手与触觉灵巧手研发,凭借强大技术、独特设计、先进传感技术及优化控制算法,打造出高性能的 Allegro Hand 四指灵巧手系列产品,包括 Allegro Hand V4、Allegro Hand V5 Plus,Allegro Hand V5 Sense 。
三款机型共享标准硬件底座:16DOF 四指独立驱动、兼容 ROS 开发环境,但在触觉传感、仿生运动结构存在区分,适配不同层级具身智能灵巧手科研项目。

Allegro Hand V5 Sense 触觉灵巧手

核心优势
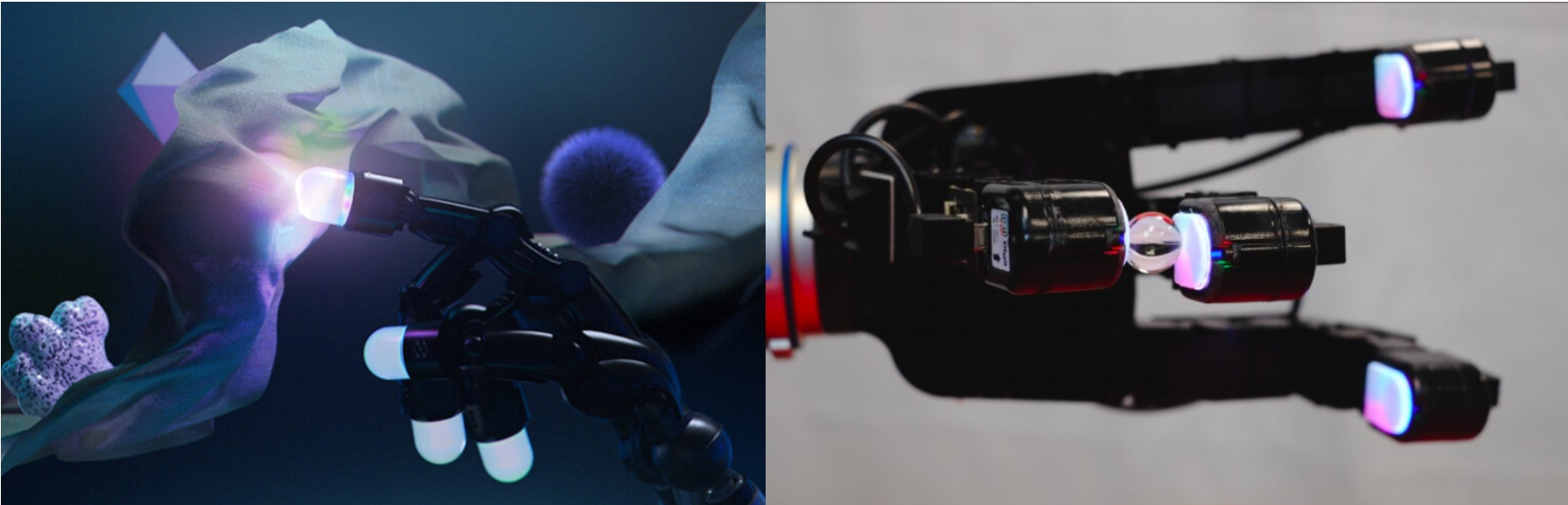
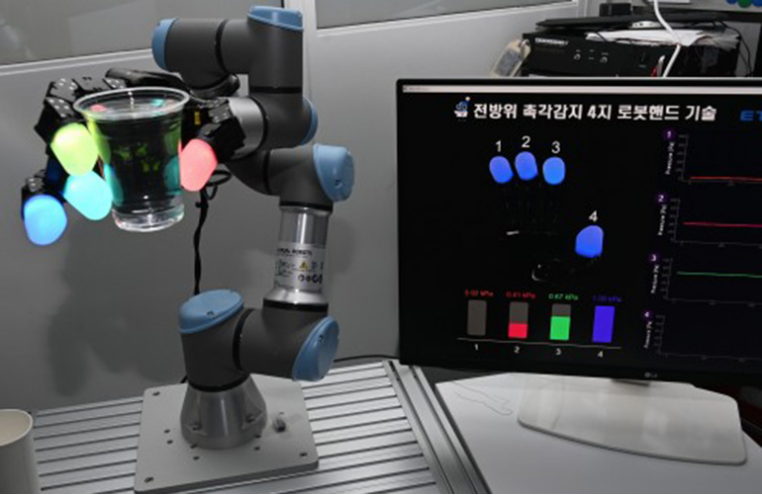
- 双重传感组合:360° 全向触觉感知 + 16 通道电容压力传感,自带温度补偿,输出高精度压力分布数据;
- 独有手指内收外展仿生结构,仿人手抓取姿态,微小工件操作精度更强,最大承重15kg;
- 压力数据色彩可视化,刚性、软体、易碎物料均可柔性操控。
Allegro Hand V5 Sense 提供类似人手的自然、多功能抓握能力,适合具身智能、力控闭环、人形机器人、精密装配高阶研发。
Allegro Hand V5 Plus 触觉灵巧手

核心优势
- 指尖覆盖 360° 触觉传感器,改善传统曲面传感信号失真问题,指尖受力变色便于观测;
- 搭载成熟自适应抓取算法,稳定适配软性、异形工件,最大承重15kg。
Allegro Hand V5 Plus 可实现对各种形状物体的精准控制与稳定抓取,是高性价比触觉研究平台。
Allegro Hand V4 四指灵巧手

Allegro Hand V4有4根手指,具备16个独立电流控制关节,采用轻量级拟人设计,适用于研究和工业领域,最大承重5kg,支持实时控制,还配备多种现成的无传感器抓握算法,能处理各种物体几何形状。
Allegro Hand V4 专为机器人复杂抓握、柔性操作及触觉传感器研究设计,经济高效且高度灵活,是抓取与操作研究及教育的优选平台。

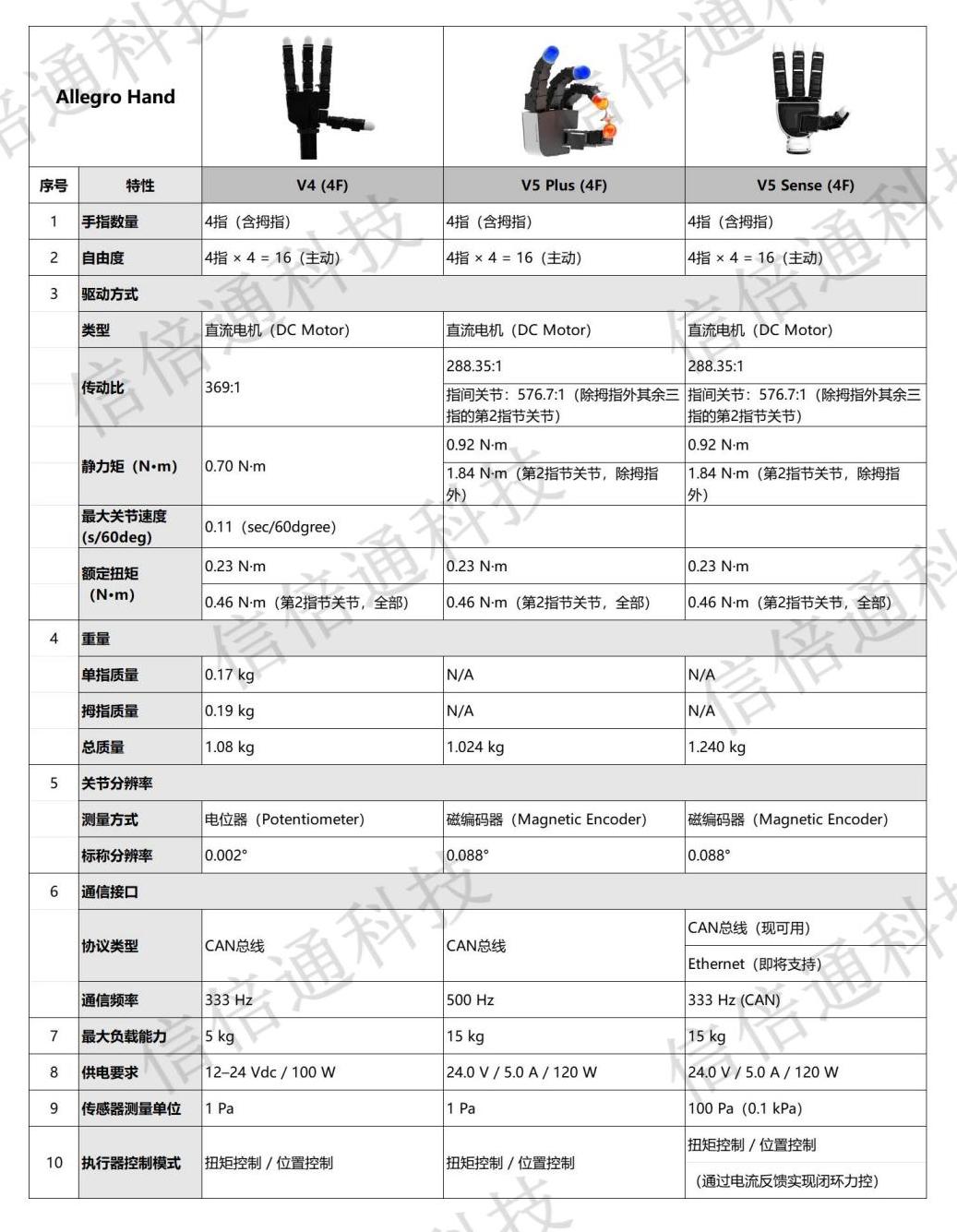
Allegro Hand 产品参数表
Allegro Hand 广泛的应用场景
科研和教育领域:用于抓取控制算法、具身智能、触觉传感及机器人动态操作等研究。
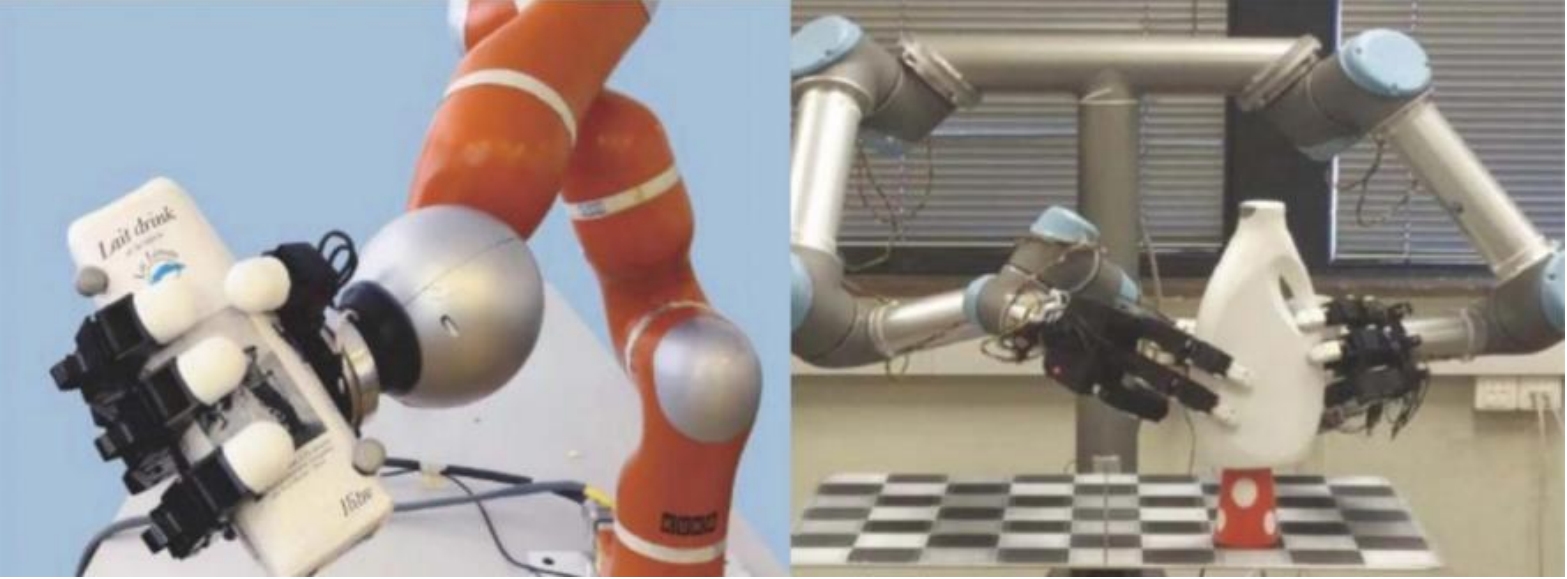
工业领域:提升装配和物料搬运的效率与质量。Allegro Hand V5系列 尤其适用于食品包装、眼镜制造等对处理易碎和柔软物品有要求的场景,在人形机器人和移动操作领域作为末端执行器,可使手部动作自然精准。
Wonik Robotics 与众多研究机构和企业紧密合作,不断拓展产品应用领域,推动技术创新,持续优化产品性能,以满足全球客户多样化需求。



